Formlabs
Shipped Oct 2024
Internship, embedded UI

Team
Product Designer (me) + 1 PM + 2 engineers
Role
Tools
Figma, Jitter
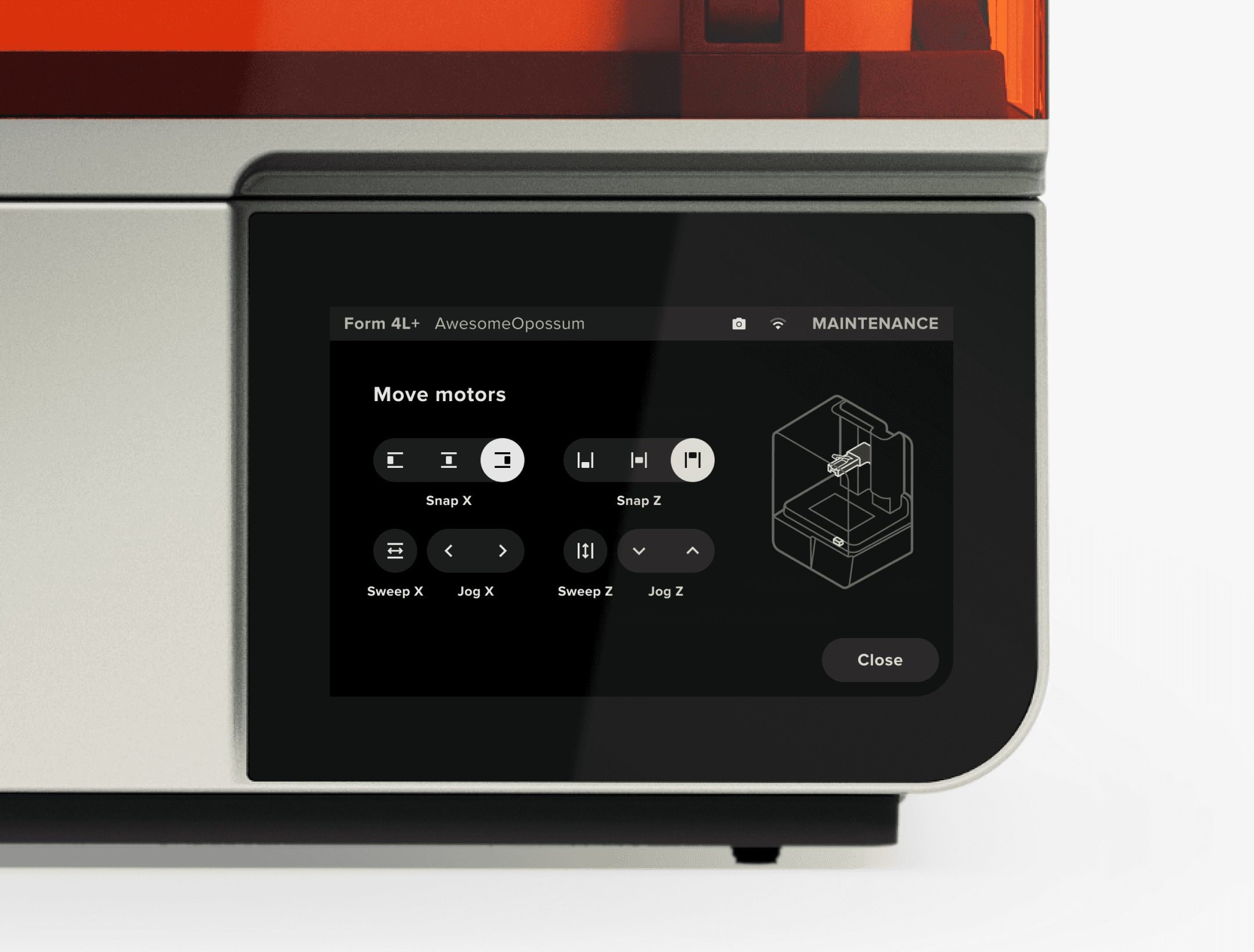
Form 4, Formlabs' next-gen 3D printer, lets users perform most maintenance themselves. I designed the Motor Control feature end-to-end, ensuring motor maintenance is safe and approachable. Shipped to 30K users in October 2024, with 6K tasks completed in the first week.
Overview
Match control interactions with maintenance needs
Older Formlabs printers restricted motor control access, yet users found workarounds — often risking damage. I began by studying support tickets, community forums, and prior research to understand real maintenance needs and define the foundational patterns.
Soluion
Snap: jumping to anchor positions
The most common use for checking the machine when precision is prioritized: install or remove platform, laser calibration, motor homing, etc,.
Sweep: automated motion
Sweeping allows to fix issues in continuous condition, such as leveling resin, motion checking, etc,. Compare to other press-to-execute quick actions, an extra confirmation is required for automation to enhance safety.
Jog: manual fine positioning
Jogging is not as common as the other two, but works the best when user needs to reach a specific spot on build platform or resin tank, such as checking rail misalignment.
Software and hardware as one experience

The embedded screen on 3D printer isn't a phone in your hand. It's a screen on a machine — tilted, stacked, splashed with resin, touched with gloves. I designed the UI composition and interactions around these ergonomic constraints — prioritizing efficiency, clarity, and building muscle memory fast.

Working closely with embedded software engineer and mechanical engineer, I tested concepts through on-printer live prototypes and mockups to understand how software and hardware shape experience as a whole. Motor behavior, mechanical latency, and on-screen interactions all considered together.
Design system
Icons and illustrations that read clearly in any workshop


I built a set of icons and illustrations that communicate motor operations at a glance, ensuring users at all levels and under any workshop environments can clearly see and understand.
Safety-first design

Interrupting the motor operation can cause injury and machine damage. To enhance safety, I designed contextual warning messages to keep user informed at different stages of the task about what happens next and what they should do.